How to read. The 8x8 grid samples 64 of the on-disk 4096 (=64x64) tracks; pixel centers [18, 50, …, 242] on a 256x256 image.
Camera compensation. Already applied at preprocessing time: the SpatialTracker3D output is transformed per-frame as
Colour. Mirrors
Dead-zone. Cells / tracks with |flow| < 4.0 mm render as solid black (no arrow, no polyline) so tracker-noise-grade motion doesn't bleed into the figure.
Arrows. Per-cell arrow = cabinet projection of the unit 3D direction (
Camera compensation. Already applied at preprocessing time: the SpatialTracker3D output is transformed per-frame as
R[t]·p_cam + t[t] into the window's world frame (preprocessing/SpatialTracker.py:435-438), then materialize_samples.py subtracts the per-frame median displacement as a robust ego-motion cleanup. gt[T] − gt[0] is therefore world-frame motion with camera rotation + translation removed; cells should only saturate where things actually move relative to the scene.
Colour. Mirrors
_flow_norm + _norm_to_rgb in train_forward_dynamics.py, but with symmetric per-channel bounds (-b, +b) so zero flow renders as mid-gray (0.5, 0.5, 0.5) instead of getting tinted by asymmetric percentile lo/hi. b for this run (cam_0 (x, y, z), gap 4, p=0.1/99.9): [+0.0559, +0.0510, +0.0504] m.
Dead-zone. Cells / tracks with |flow| < 4.0 mm render as solid black (no arrow, no polyline) so tracker-noise-grade motion doesn't bleed into the figure.
Arrows. Per-cell arrow = cabinet projection of the unit 3D direction (
screen = (vx − 0.5·vz, vy − 0.5·vz)); arrow colour flips white on dark cells so it stays readable. Polylines in panel 2 = projected (K[0]) tracks across frames 0..4.
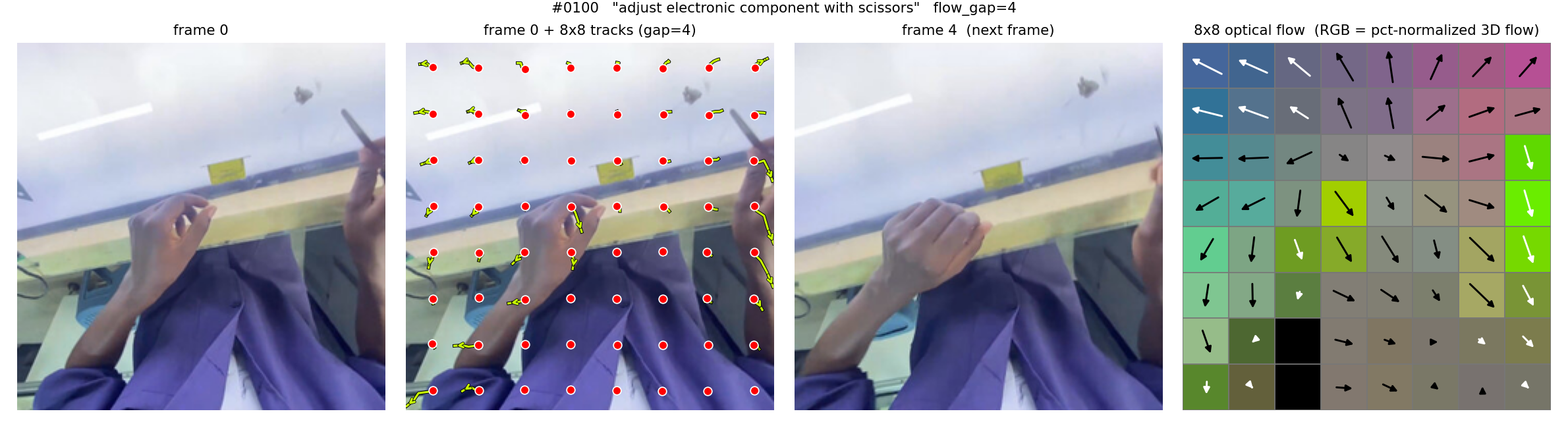
#0100 median 3D motion (gap 4): 14.3 mm
"adjust electronic component with scissors"
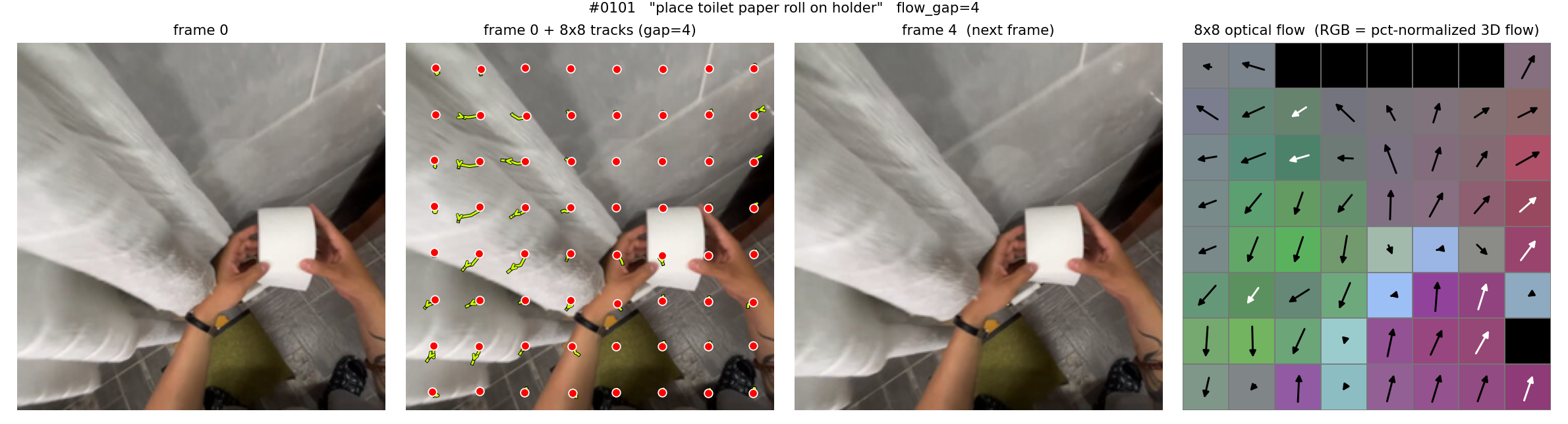
#0101 median 3D motion (gap 4): 13.6 mm
"place toilet paper roll on holder"
#0107 median 3D motion (gap 4): 12.7 mm
"clear the remaining weeds and manipulate the soil"

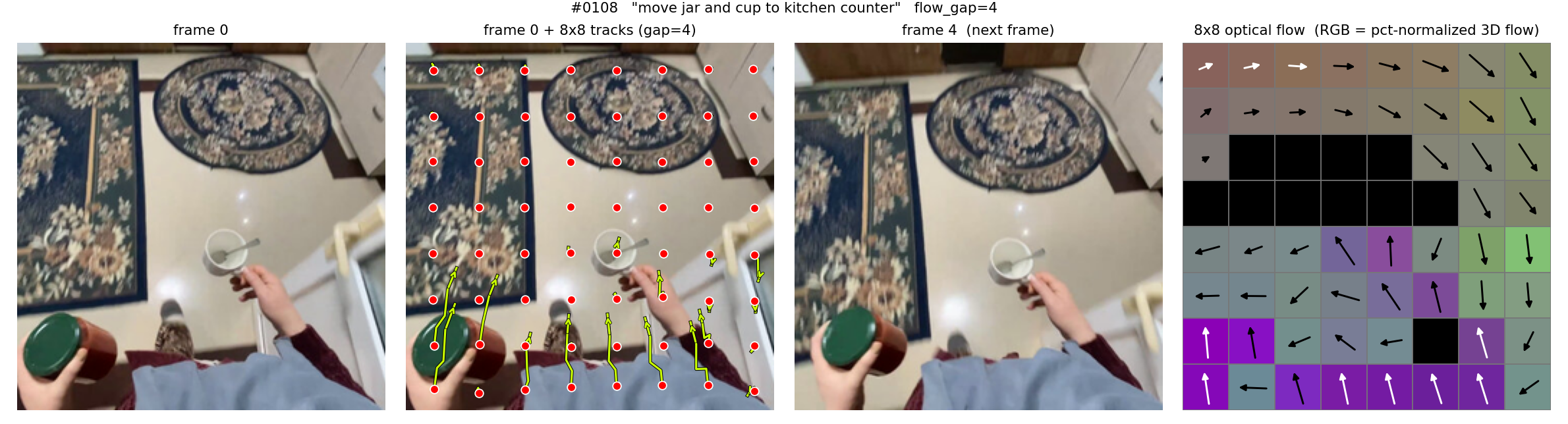
#0108 median 3D motion (gap 4): 9.9 mm
"move jar and cup to kitchen counter"
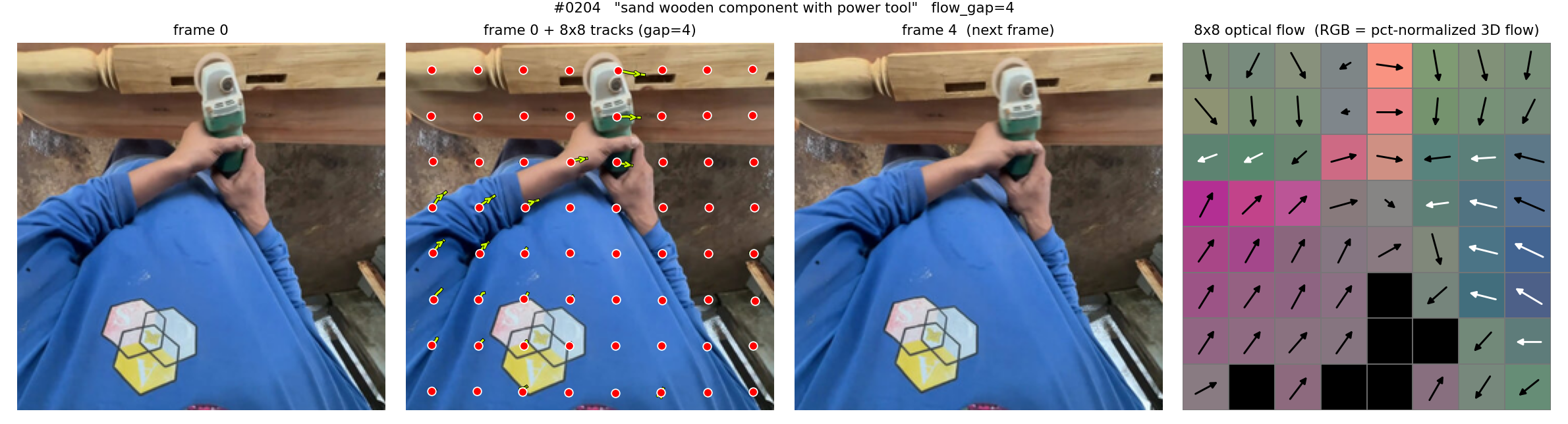
#0204 median 3D motion (gap 4): 9.3 mm
"sand wooden component with power tool"
#0201 median 3D motion (gap 4): 6.9 mm
"place wooden strip on desk, pick up wooden board"

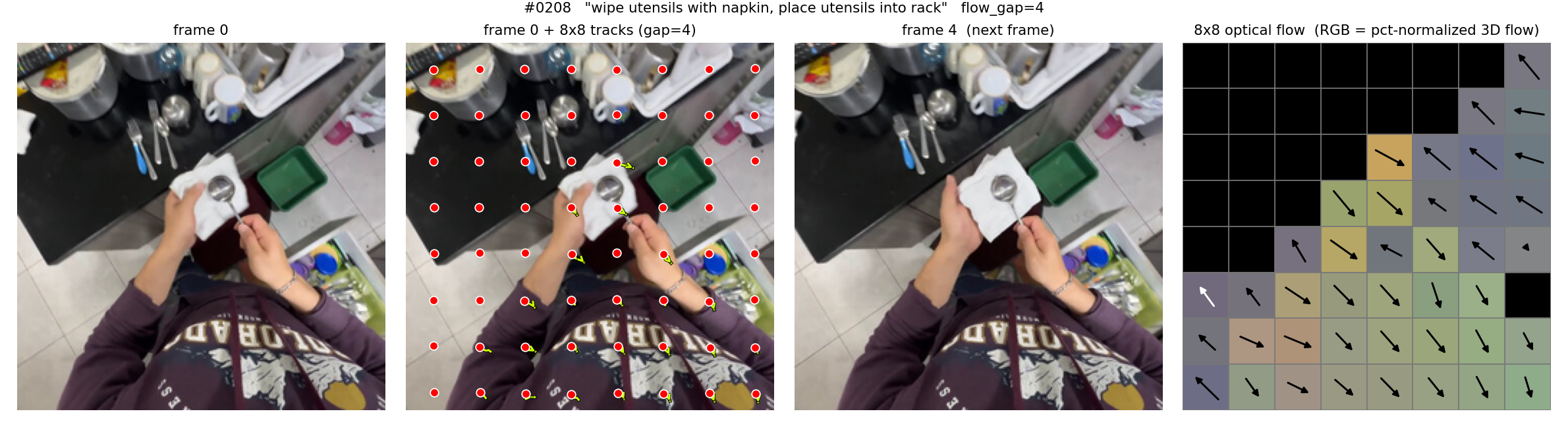
#0208 median 3D motion (gap 4): 6.6 mm
"wipe utensils with napkin, place utensils into rack"
#0302 median 3D motion (gap 4): 6.2 mm
"hammer side of wooden box to loosen"

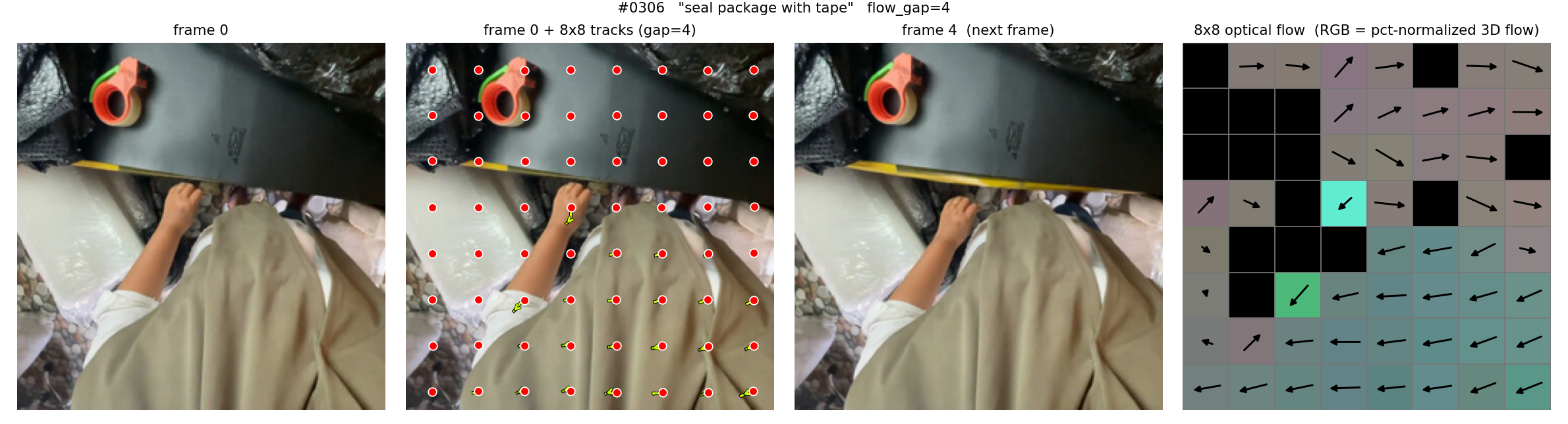
#0306 median 3D motion (gap 4): 5.4 mm
"seal package with tape"
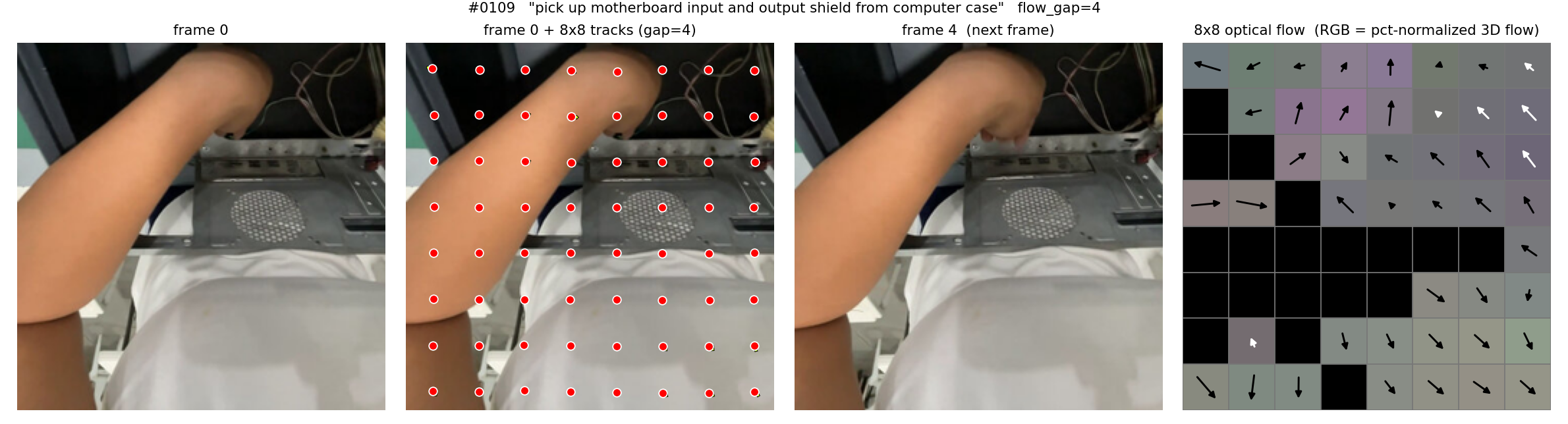
#0109 median 3D motion (gap 4): 6.5 mm
"pick up motherboard input and output shield from computer case"